|
DSPオフサマースクールについては、コチラのサイトを御覧ください。
Max/MSPやJitterについては興味があるけど、ロボットを使ったワークショップって一体なにするの?なんてヒトも多いはず。また逆に、LEGO社のマインドストームやロボットには興味があるけど、Maxって何?というヒトも多いはず。そこで、このページでは、DSPオフサマースクールで受講者のみなさんが実際に使用するロボットくんたちとMax/MSPについて、簡単に御紹介したいと思います。 ■ニュース! サマースクールのプレゼンテーションでも面白そうなことをやってくれそうな、電子工作ライブユニット・ハッピースターインターフェース。彼等が、みなさんがワークショップで使用する、フィッシャーテクニック社のロボットを組み立て、制作風景を楽しくレポートしてくださいました。ワークショップの参考になると思いますので、是非御覧下さいませ! ハピスタのグル星野さんが産業用ロボット、ケン・コーダさんが自走ロボットを制作してくださいました。 http://www.happystar.com/fischer/ ハピスタのグル星野さんから、産業用ロボットの続報が届きました。(なんだかオモチャとは思えない...) http://www.happystar.com/fischer/making_robot_i/index6.html ハッピースターインターフェースのプロフィール ハッピースターインターフェースのプレゼンテーション(下の方にあります) ■fishertechnikのロボットキット 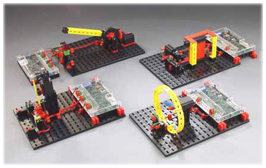 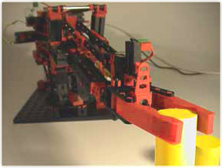 fishertechnikのロボット入門キット(左)と産業用ロボット(右) 今回のワークショップに御協力いただいているのは、ドイツのfishertechnik(フィッシャーテクニック)社。ロボット・キットを発売して35年以上!という古い歴史をもち、fishertechnik社のキットは欧米では、教育用教材としてもとてもポピュラーだそうです。 ロボットの見た目は、「さすがドイツ!」と思わせるような、赤と黄色のブロックがハードで、カッコ良い感じです。レゴ社のブロックを連想させますが、それよりとても頑丈にできています。(私もレゴブロックでロボットを作ったことがあるのですが、実際に動かしてみると、折角作ったブロックがポロっと取れしまうことがあり、随分悲しい思いをしました....) ロボット・キットは数種類発売されていますが、今回のワークショップで使用するのは、「産業用ロボット」と「自走ロボット」の2種類です。「産業用ロボット」は、産業用のロボット(自動車工場の溶接ロボットを想像すると分りやすい)の動きをモデルとしています。ロボット・アームがついていて、ものを掴んで移動させる、というような動きをさせることもでき、なかなか面白くて、大きな動きをします(下のリンク集にムービがあります、必見!)。「自走ロボット」は、その名前から想像できるように、「自走する」のですが、付属のセンサーを組み合わせることにより、例えば、黒いラインの上を走らせる、光を追跡させる、障害物を回避する、など、プログラムによっては、複雑な動きをさせることができるでしょう。また、fishertechnikの日本の代理店「のもと」さんが制作した、二足歩行ロボットも何らかの形で発表していただく予定です(世界初公開)。 4日間に渡るワークショップでは、数人のグループでロボットを組み立て、そのロボットたちを、Max/MSP/Jitterからコントロールします。ただロボットをコントロールして遊ぶのもとても楽しいですが、Max/MSP/Jitterと連動させることにより、コンピュータの画面のなかだけでなく、プログラミングして物理的にモノ(=ロボット)が動いているのを見るのは、なかなか出来ない体験であり、ちょっと感動します。また、各自の作品に応用することももちろんできます。アイディア次第では、素敵なものができるでしょう。 ■ワークショップの協力会社へのリンク集 ■「fishertechnik」社のプロダクト紹介のページ http://http://www.fischertechnik.de/english/index.html (英語) ■「fishertechnik」社のプロダクト紹介のページ http://www.fischertechnik.de/produkte/produkte.html(但しドイツ語!) ■fishertechnikのロボットたちのムービー(QuickTimeMovie)です。とってもカワイイです、必見です! ワークショップで使用する産業用ロボットのムービー(1.6MB) 実験用ロボットのムービー(3.1MB) 空気圧ロボットのムービー(1.4MB) ■fishertechnik社の日本代理の「のもと」さんのページ http://www.kknomoto.co.jp/ ■ワークショップで使用する「自走ロボット」の紹介ページ http://www.kknomoto.co.jp/fischer/cp/cp03.htm ■ワークショップで使用する「産業用ロボット」の紹介ページ http://www.kknomoto.co.jp/fischer/cp/cp04.htm ■「Boeig und Kallenbach」のページ http://bkohg.com/(ドイツ語) http://bkohg.com/index_e.html(英語) Boeig und Kallenbach社は、fishertechnik社のロボットとコンピュータをつなぐUSBインターフェイスの開発を行っているドイツの会社。「ぼぉゅーにんぐ うんと かれんばっは」と読むそうです。 ■Max/MSP/Jitter 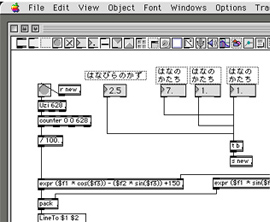
Maxはグラフィカルなオブジェクト指向プログラミング環境で、MSPは音響処理を、Jitterは映像処理をMaxに追加する拡張ソフトウェアです。上図のように、ある機能を持った箱を線で繋ぐことによりプログラミングを行うので、初心者の方にも解り易く、プログラミングをすることができます。Max/MSP/Jitterは、開発会社であるCycling'74社のウェブページからダウンロードすることができ、1ケ月間は無償で使用することができます。尚、Max/MSP/JitterはMacintosh上で動作しますが、先日Windows版が発表され、近い将来には、Windowsマシンにも対応すると思われます。 DSPオフサマースクール2003には、初心者向けのレクチャーが容易されているので、全くの初心者の方でも大丈夫です。また、2月から初心者のためのメールマガジン「DSPマガジン〜ビギナーズ・チュートリアル」を発行しますので、もし事前に勉強しておきたい方は、メールマガジンの購読をお勧めします。 ■Max/MSP/Jitter関連リンク ■Max/MSP/Jitter開発元の「Cycling'74」社のページ http://www.cycling74.com/index.html ■Max/MSPを解説した書籍「トランスMAXエクスプレス」のページ http://max.iamas.ac.jp/ ■「DSPマガジン〜ビギナーズ・チュートリアル」のページ DSPサマースクール実行委員会のお届けするメールマガジンの購読申し込みができます。 http://dspss.iamas.ac.jp/noi/magazine.html ■fishertechnikのロボットとMax/MSP/Jitterをつなぐ  では、どうやってロボットとMax/MSP/Jitterをつなぐのでしょうか?(元々、ロボットキットに付属しているソフトウェアはWindowのみ対応しています。)簡単に書くと、
では、どうやってロボットとMax/MSP/Jitterをつなぐのでしょうか?(元々、ロボットキットに付属しているソフトウェアはWindowのみ対応しています。)簡単に書くと、
ロボット − USBインターフェース − Macintosh −Maxオブジェクト といったかんじです。まず必要になってくるのが、ロボットとコンピュータを繋ぐ為の、Boeig und Kallenbach社のUSBインターフェイス「SERVCE USB」。左の写真のものです。ちょっと透明なブロックみたいで、これまたかわいらしいです。ワークショップでは、これにfishertechnik社のロボットをつなぐのですが、それに限らず、その他のセンサーのコントロールにも使用することができます。 Max/MSP側では、講師の赤松氏が専用のMaxオブジェクトを開発しました!OS 9版だけでなく、OS X版も開発しているので、将来的にもまだまだ使えます(笑)。 お問い合わせ:dspss@iamas.ac.jp DSPオフサマースクールについては、コチラのサイトを御覧ください。 |