乽儘儃僢僩偲偺嫟惗乿丂僾儗僛儞僥乕僞丗(姅)僀僋僔僗儕僒乕僠 嶳嶈暥宧

嶐崱丆恖宆儘儃僢僩傪巒傔偲偡傞懡偔偺儘儃僢僩偑搊応偟丆儘儃僢僩偑傛傝恎嬤側懚嵼偵側偭偰偒偰偄傑偡丏
儘儃僢僩偼丆偦偺岅尮偐傜丆恖娫偵巇偊傞傕偺丆偲偄偆堄枴偑偁傝傑偡偑丆尰嵼偺儘儃僢僩偼丆巇偊傞埲忋偺傕偺傪恖娫偵梌偊偰偔傟偰偄傑偡丏
偦偺堦偮偵僄儞僞乕僥乕儊儞僩偑嫇偘傜傟傑偡丏偙傟偼丆捈愙揑偵恖娫偵懳偟偰暔棟揑側嶌梡傪巤偡偺偱偼側偔丆恖娫偺椙偒僷乕僩僫乕偲偟偰嫟惗偟丆恖偺怱傪朙偐偵偟偰偔傟傑偡丏
杮島墘偱偼丆偦偺堦椺傪徯夘偟丆崱夞奐敪偟偨妝婍儘儃僢僩偺奣梫偵偮偄偰弎傋偨偄偲巚偄傑偡丏
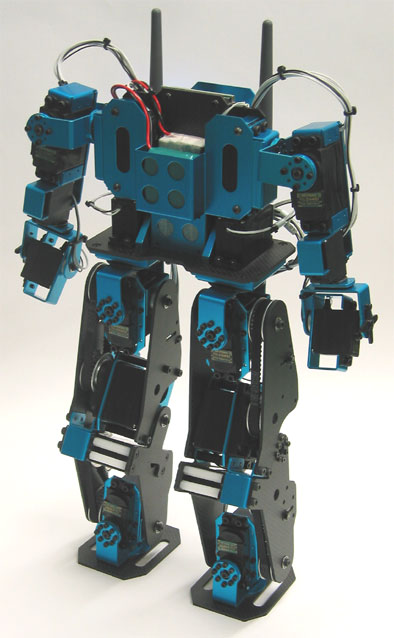
仸塃幨恀偼丄(姅)僀僋僔僗儕僒乕僠偺儘儃僢僩偱偡乮僋儕僢僋偡傞偲戝偒偔側傝傑偡乯丅
乽僼傿僢僔儍乕僥僋僯僢僋偺儘儃僢僩僉僢僩偵偮偄偰乿丂僾儗僛儞僥乕僞丗(姅)偺傕偲丂栰杮朚晇
戞侾復僽儘僢僋僉僢僩傑偨偼僐儞僗僩儔僋僔儑儞僉僢僩
丂侾亅侾抦堢娺嬶偲偟偰偺僽儘僢僋僉僢僩
丂憿宍擻椡傪崅傔憂憿椡傪巋寖偡傞僽儘僢僋
丂抦堢娺嬶丄嫵堢娺嬶偲偟偰偺僽儘僢僋
丂愊傒栘偐傜奺庬僽儘僢僋傑偱
丂侾亅俀僼傿僢僔儍乕偺僽儘僢僋僉僢僩偲慻棫峔憿
丂榋柺懱愙崌峔憿偺僼傿僢僔儍乕偺僽儘僢僋偺摿挜偼
丂侾亅俁僼傿僢僔儍乕偺儘儃僢僩僉僢僩
僼傿僢僔儍乕偺楌巎偲悽奅嵟弶偺儘儃僢僩僉僢僩
戞俀復僼傿僢僔儍乕偺儘儃僢僩僉僢僩
丂俀亅侾慻傒棫偰峔憿
丂俀亅俀僙儞僒乕偲儅僯儏僺儗乕僞乕
丂俀亅俁惂屼梡僀儞僞乕僼僃僀僗
丂俀亅係僾儘僌儔儈儞僌尵岅LLWin
戞俁復嶻嬈儘儃僢僩偵偮偄偰
丂俁亅侾嶻嬈儘儃僢僩偺楌巎
丂俁亅俀嶻嬈儘儃僢僩偺尰忬
丂俁亅俁僼傿僢僔儍乕偺嶻嬈儘儃僢僩
丂俁亅係僥傿乕僠儞僜僼僩
戞係復帺憱儘儃僢僩偵偮偄偰
丂係亅侾嶻嬈儘儃僢僩偲偟偰偺帺憱儘儃僢僩乮斃憲儘儃僢僩乯
丂係亅俀嫞媄梡偺帺憱儘儃僢僩
丂丂偡傕偆儘儃僢僩
丂丂僒僢僇乕儘儃僢僩
丂丂儅僀僐儞僇乕儔儕乕乮儔僀儞僩儗乕僗乯
丂丂儅僀僋儘儅僂僗
丂係亅俁僼傿僢僔儍乕偺帺憱儘儃僢僩
戞俆復曕峴儘儃僢僩偲偦偺尨棟
丂俆亅侾悽奅嵟愭抂傪峴偔擔杮偺曕峴儘儃僢僩
丂俆亅俀曕峴儘儃僢僩偺擻椡
丂丂帺棫惈
丂丂俀懌曕峴
丂丂塣摦擻椡
丂丂忬嫷曄壔懳墳擻椡
丂丂
丂丂埵抲暘愅懳墳擻椡
丂俆亅俁僼傿僢僔儍乕偺曕峴儘儃僢僩乽僼傿僢僔儍乕僩僢僪儔乕乿
丂丂曕峴尨棟
丂丂曕峴擻椡
丂俆亅係曕峴儘儃僢僩偺嫞媄夛ROBO-ONE
乽battle@mail乿丂僾儗僛儞僥乕僞丗僴僢僺乕僗僞乕僀儞僞乕僼僃乕僗乮Ken Kohda + Guru Hoshino乯
拲堄丗変乆偺擔乆偺妶摦偺傾僾儘乕僠偑丄儂儕僨僀丒傾乕僥傿僗僩偱偁傞偙偲傪擮摢偵尐偺椡傪敳偄偰偍晅偒崌偄偔偩偝偄丅
侾丏偼偠傔偵
杮僾儗僛儞僥乕僔儑儞埬傪峫偊傞偨傔丄変乆偼嬤強偺拑揦傊廤崌偟丄偄偮傕偺傛偆偵偩傋傝側偑傜懪偪崌傢偣傪偼偠傔偨丅僾儗僛儞僥乕僔儑儞偺庯巪偱偁傞儘儃僢僩偲MAX偁傞偄偼暿偺僥僋僲儘僕乕傪慻傒崌傢偣偰丄壗傪幚尰偟偨偄偐僀儊乕僕偟偰傒偨丅
俀丏幚尰僀儊乕僕
僾儗僛儞僥乕僔儑儞偵偼変乆偺僐儞僙僾僩偱傕偁傞偍徫偄僷僼僅乕儅儞僗揑梫慺傪娷傔偨偄堄巚傛傝丄帠慜偵採帵偝傟偰偄偨偄偔偮偐偺庯巪傪嬋夝偟偮偮丄儘儃僢僩傊埲壓偺傛偆側婡擻傪惙傝崬傓偙偲偲偟偨丅
battle@mail僐儞僙僾僩丗
1.儘儃僢僩偩偐傜愴傢偹偽側傜側偄
丂2戜偺儘儃僢僩傪憖嶌偟屳偄偵懳愴傪峴偆偙偲偲偡傞丅
丂僈儞僟儉悽戙偱偁傞偙偲偐傜惎栰偑嫮堷偵庡挘偟偨
2.儘儃僢僩偼実懷揹榖偱憖嶌偡傞
丂儘儃僢僩傪憖嶌偟偨偄恖偼扤偱傕儊儖桭偵儊乕儖傪懪偮偑偛偲偔丄働乕僞僀揹榖傛傝僐儅儞僪傪憲傞丅
丂儘儃僢僩偵傛傞懳愴寢壥偼嶲壛幰偵儊乕儖偱曉怣偝傟傞丅
3.儘儃僢僩偼墘憈偡傞
丂実懷揹榖偵傛傞僐儈儏僯働乕僔儑儞帪戙偵憡墳偟偄壒怓傪憈偱傞條丄愱梡IC傪搵嵹偡傞丅
4.儘儃僢僩偼旈枾僐儅儞僪傪撪憼偡傞
丂岞奐偡傞偲戝曄婋尟側堊丄偙偙偱偼撪弿偵偟偰偍偔丅
5. 傾乕僉僥僋僠儍乕
丂嶲壛幰偼丄実懷揹榖偺儊乕儖杮暥偵儘儃僢僩傊憲怣偡傞僐儅儞僪傪擖椡丒憲怣偡傞偙偲偵傛傝丄儘儃僢僩傪惂屼偡傞偙偲偑偱偒傞丅
丒儘儃僢僩偼婛惢偺僾儔儌傪棙梡偟夵憿偡傞丅
丒嬱摦晹暘偼儅僀僋儘僐儞僺儏乕僞(PIC)偵傛傝惂屼偡傞
丒儘儃僢僩偼RF儌僕儏乕儖傪梡偄丄柍慄僐儞僩儘乕儖偡傞
丒奺儘儃僢僩惂屼梡偺儊乕儖傾僪儗僗傪梡堄偡傞
丒儘儃僢僩惂屼梡偺儊乕儖僐儅儞僪乮椺丗2468偱慜屻嵍塃側偳乯傪掕媊偡傞
丒惂屼梡PC偼儊乕儖傪弴師庢傝崬傒丄儘儃僢僩傊惂屼僐儅儞僪傪憲怣偡傞
6. 偍傢傝偵
杮奣梫偼偁偔傑偱傕惢嶌慜偺僀儊乕僕偱偁傝丄尩枾偵嵞尰偝傟傞偲偼尷傝傑偣傫偺偱丄偛椆彸偔偩偝偄丅